

 联系我们
联系我们

Pepper机器人科研应用
01
Pepper机器人使用Leap Motion体感控制器远程控制手臂

案例描述:该案例在Pepper机器人平台上,利用了Leap Motion体感控制器展示了新的一种人机交互方式,通过体感控制器进行手部数据采集,将识别到的手势动作经计算机分析处理后,通过网络程序传输至Pepper机器人,从而进一步控制pepper机器人的手臂来模仿人手的动作,来打开瓶盖,倒水。
02
Pepper机器人导航
Pepper机器人创建地图后,添加要在本地图中要到达的地点以及添加语音命令,来控制机器人。
Github开源代码
PepperRobot-Navigation:
https://github.com/PedroFvOliveira/PepperRobot-Navigation
03
Pepper机器人抓取、人员检测和避障导航
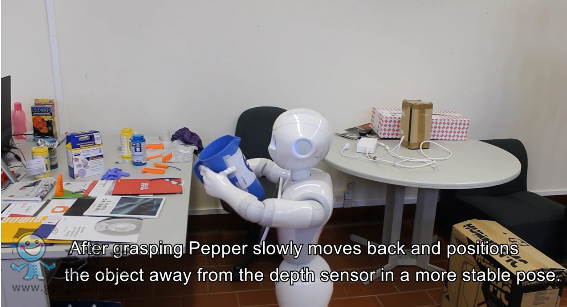
案例描述:使用Pepper机器人进行物体抓取,行进线路上的人员检测识别和避障导航。
Github开源代码
Model-Based Tracker:
https://github.com/lagadic/vision_visp
Hand Pose Estimation:
https://github.com/lagadic/pepper_hand_pose
Pepper Control:
-Joint velocity controller
https://github.com/lagadic/pepper_control
ViSPNaoqi:
-Brigde over ViSP and SoftBank SDK
-Kinematic model of the robot using
https://github.com/lagadic/visp_naoqi
更多资讯:软银机器人